I recently purchased a RooStick from RoombaDevTools.com. $29 + $6.50 shipping.
If you don’t feel like building your own Roomba serial interface to let you hack your Roomba into a robot, you can use a RooStick.
The RooStick is a USB-to-Serial adapter with a Mini DIN 7-pin socket on it that matches the SCI connector on the Roomba. It is an unencased circuit board with a USB connector soldered on one end and the Mini DIN on the other. The circuit consists of a CP2103 USB-to-UART chip and a couple of LEDs.
Here’s what it looks like plugged into my Powerbook:

While RoombaDevTools doesn’t advertise it because they are focusing on the Windows crowd, the CP2103 has drivers for other OSes. You have to hunt around the Silicon Labs site, but under the
USB-to-UART Virtual COM Port (VCP) drivers page you can find drivers for all the other OSes. Of course, like all USB-to-serial drivers, they require a reboot.
[update: The SiLabs site doesn’t have a link to Linux drivers because the driver is already in the Linux kernel. It’s called “cp2101” and should auto-load if you have USB hotplug correctly configured (like Ubuntu does)]
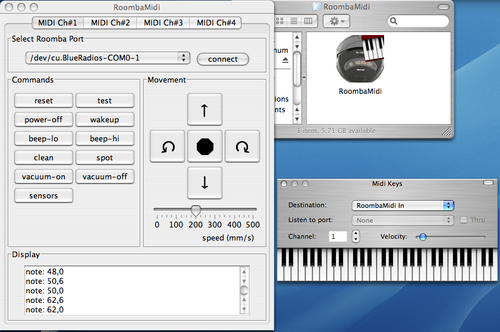
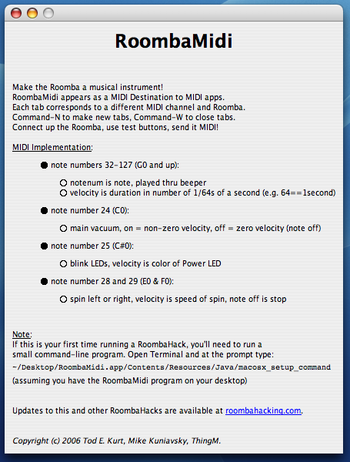
Since it appears as a serial port to your OS, you can use any program that can talk to serial ports to control the Roomba. My RoombaComm API library and any of the apps built on it, like RoombaMidi work with the RooStick.
Issues:
While the RooStick works great, there are a few things to be aware of.
Use their cable
You must use their 7-pin to 7-pin cable. Using a standard Mac serial Mini DIN 8-pin to Mini DIN 8-pin cable from Jameco or wherever will blow out the SCI port on your Roomba. Trust me on this, as I have a dead Roomba to show for it. You could build your own cable, but RoombaDevTools doesn’t yet publish the pinout. From my own experimentation, the pinout appears to be a left-right mirror of the standard Mac pinout. This configuation isn’t guaranteed to stay the same, as RoombaDevTools could change it at any point. Use their cable. Doing so adds $17 to the $29 price of the RooStick but it’s cheaper than replacing your Roomba.
Hot LEDs
The Vpwr LED showing Roomba power gets very (dangerously?) hot. Be careful when grasping the RooStick or you’ll burn your finger. I’ve not measured how much power that LED is drawing. It’s probably not a power concern for the Roomba, but I’m sure the LED’s life is being shortened.
Cable too short
The optional 7-pin cable for the RooStick is only 6 feet long. Even a 10 foot cable is too short if you’re actually driving the Roomba around. I recommend at least a 15 foot cable. The 6 foot cable is only good for stationary Roomba projects, or when the laptop sits on the Roomba.
Other than those issues, the RooStick is a great way of getting into Roomba hacking.